Biện pháp thi công khoan ngầm bằng robot
Có thể không dễ dàng hơn nếu các đường hầm có đường kính nhỏ có thể được khoan trực tiếp vào đất - đặc biệt là trong môi trường đô thị?
Ngày đăng: 03-11-2020
2,184 lượt xem
CHUYÊN ĐỀ BIỆN PHÁP THI CÔNG KHOAN NGẦM BẰNG ROBOT TRONG CÔNG TÁC LẮP ĐẶT ỐNG NGẦM VÀ CÁP VIỄN THÔNG
Sự gia tăng nhu cầu xây dựng hệ thống hạ tầng kỹ thuật ngầm tại các khu vực đô thị, khu công nghiệp, tuyến giao thông trọng điểm và khu vực ven sông đặt ra các yêu cầu mới cho công nghệ thi công. Phương pháp đào rãnh truyền thống vốn đòi hỏi giải phóng mặt bằng lớn, thời gian thi công dài và gây tác động mạnh đến giao thông, môi trường và kết cấu hạ tầng hiện hữu. Trong bối cảnh đó, công nghệ khoan ngầm robot là bước phát triển tiếp theo của khoan định hướng ngang (HDD), hướng đến mục tiêu tự động hóa, tăng độ chính xác và giảm thiểu tối đa ảnh hưởng bề mặt. Một trong những hệ thống robot khoan ngầm tiên tiến đang được nghiên cứu và ứng dụng là BADGER, một giải pháp do Liên minh Châu Âu tài trợ nhằm phát triển công nghệ đào ngầm tự động phục vụ xây dựng ống kỹ thuật nhỏ, ống cấp nước, ống dẫn ga và ống luồn cáp viễn thông dưới lòng đất mà không cần đào rãnh hoặc mở đường công trình.
Khoan đặt ống ngầm là hoạt động kỹ thuật phức tạp do phải xuyên qua nhiều lớp địa chất khác nhau, đồng thời phải tránh được hệ thống hạ tầng ngầm hiện có như ống cấp thoát nước, tuyến cáp ngầm, móng công trình và đá gốc. Phương pháp HDD truyền thống đã giảm đáng kể rủi ro so với đào rãnh nhưng vẫn phụ thuộc lớn vào thao tác của con người và khả năng theo dõi tuyến khoan dựa trên thiết bị định vị sonde hoặc công nghệ MWD. Khi địa hình phức tạp, chiều sâu lớn hoặc tuyến đi cong nhỏ, năng lực điều hướng chính xác của giàn khoan truyền thống bị hạn chế. Đây chính là lý do các nhà nghiên cứu bắt đầu phát triển robot khoan ngầm tự hành – một thiết bị có thể trực tiếp di chuyển trong lòng đất, tích hợp các thiết bị cảm biến, hệ thống dò địa chất, cơ cấu định vị và bộ điều khiển tự động.
Robot BADGER được thiết kế với cấu trúc thân phân đoạn dạng ren xoắn. Mỗi phân đoạn được liên kết bằng khớp linh hoạt cho phép robot thay đổi hướng khoan theo ba trục không gian để phù hợp với tuyến thiết kế. Phía trước robot là đầu khoan có khả năng xoay, phay và tạo áp lực tiến phù hợp với nhiều dạng địa chất, từ đất mềm, bùn sét đến đất pha đá. Đầu khoan còn được tích hợp công nghệ siêu âm để tạo dao động phá vỡ cấu trúc đất đá, tăng năng suất khoan và giảm lực cản. Ứng dụng siêu âm trong khoan ngầm giúp giảm mức tiêu thụ năng lượng và cho phép robot khoan qua vật liệu cứng mà không cần sử dụng lượng lớn dung dịch khoan.
Một ưu điểm nổi bật của robot BADGER là khả năng kẹp và trượt của từng phân đoạn. Mỗi phân đoạn được trang bị chân kẹp để bám vào thành hầm. Khi một phân đoạn kẹp vào thành, các phân đoạn phía sau có thể đẩy lên phía trước nhờ cơ cấu trượt, tái tạo chuyển động nhu động tương tự như động tác di chuyển của sâu đất. Cơ chế này giúp robot tiến sâu vào lòng đất mà không cần hệ thống cần khoan dài như HDD truyền thống, đồng thời giảm nguy cơ mắc kẹt khi địa tầng phức tạp.
Ở phía sau robot hoặc ở một robot thứ hai đi kèm là hệ thống in 3D. Khi robot khoan tiến về phía trước, hệ thống in 3D sẽ lắng đọng một lớp vật liệu tổng hợp lên thành đường hầm vừa được tạo ra. Lớp vật liệu này có thể là polymer, nhựa tổng hợp hoặc vật liệu composite được thiết kế để đông cứng trong thời gian ngắn, tạo thành lớp lót gia cố thành hầm, từ đó biến đường hầm thành một ống dẫn hoàn chỉnh. Việc tạo vỏ ống tại chỗ bằng công nghệ in 3D giúp đảm bảo độ kín, giảm biến dạng đường ống và hạn chế sụt lún, đặc biệt khi thi công dưới khu vực có mật độ giao thông lớn hoặc nền đất yếu.
Công nghệ khoan ngầm bằng robot mở ra nhiều khả năng ứng dụng trong thi công lắp đặt cáp viễn thông và ống cấp nước – ga tại các khu vực đô thị đông đúc, nơi việc đào rãnh truyền thống hầu như không khả thi. Khi thi công vượt qua đường giao thông hoặc vượt sông, robot có thể điều chỉnh quỹ đạo chính xác hơn, duy trì độ cong nhỏ và giảm thiểu nguy cơ phá hủy kết cấu mặt đường hoặc đáy sông. Sự linh hoạt của hệ thống điều hướng giúp robot tránh được các công trình ngầm, hạn chế tối đa rủi ro va chạm.
Việc tích hợp công nghệ thăm dò trong khi khoan (LWD/MWD) vào robot BADGER nâng cao khả năng nhận biết địa chất thời gian thực. Công nghệ LWD cung cấp dữ liệu về mật độ đất, độ ẩm, thành phần khoáng và cấu trúc lớp đất ngay tại điểm khoan. MWD bổ sung dữ liệu về hướng, độ nghiêng, độ sâu và trạng thái cơ học của thiết bị trong suốt quá trình tiến sâu. Robot nhận được dữ liệu liên tục từ cảm biến, sau đó phân tích để điều chỉnh tốc độ và hướng khoan nhằm tránh các vùng đất yếu, túi bùn hoặc đá gốc cứng bất thường.
Một số hệ thống thăm dò tiên tiến như GeoSphere và EarthStar đã cho phép mô tả địa chất trong phạm vi từ 30 đến 60 mét phía trước đầu khoan. Đây là khả năng quan trọng khi thi công vượt sông, vì nền đáy sông có thể chứa nhiều dị thường địa chất khó lường. Dữ liệu thăm dò trước giúp đơn vị thi công điều chỉnh tuyến khoan, giảm nguy cơ mất dung dịch khoan hoặc sập thành lỗ. Robot cũng có thể điều chỉnh áp lực và tần suất dao động của đầu khoan để thích ứng với từng lớp địa chất.
Công nghệ định vị robot là yếu tố cốt lõi đảm bảo quỹ đạo khoan chính xác theo hồ sơ thiết kế. Các cảm biến định vị quán tính, la bàn từ, hệ thống đo tốc độ quay và radar xuyên đất tích hợp trong robot cho phép xác định vị trí trong lòng đất với sai số nhỏ. Hệ thống định vị thường được hỗ trợ bởi mô hình số của mặt đất và bản đồ ngầm do chủ đầu tư hoặc cơ quan quản lý cung cấp. Đối với khoan ngầm qua đường, các thuật toán điều hướng hiệu chỉnh liên tục để đảm bảo robot không đi lệch khỏi vị trí quy hoạch, đặc biệt tại khu vực có móng cầu, lớp bê tông ngầm hoặc hệ thống thoát nước bên dưới.
Quy trình thi công khoan ngầm bằng robot thường bắt đầu bằng công tác chuẩn bị mặt bằng, xác định tuyến khoan, khảo sát địa chất và bố trí điểm xuất phát. Robot được đưa vào lỗ dẫn và bắt đầu khoan theo quỹ đạo đã lập trình. Dữ liệu khoan được thu thập và phân tích liên tục để điều chỉnh thông số vận hành. Khi robot đạt đến vị trí cuối tuyến, đường hầm tạo thành được gia cố bởi lớp in 3D đã tạo sẵn. Sau đó, có thể luồn thêm ống HDPE, ống dẫn nước hoặc cáp viễn thông vào đường hầm này nếu thiết kế yêu cầu.
Kiểm soát rủi ro trong thi công khoan robot được thực hiện dựa trên ba nhóm chính: rủi ro địa chất, rủi ro kỹ thuật và rủi ro vận hành. Rủi ro địa chất bao gồm nguy cơ gặp túi nước ngầm, đất yếu hoặc đá cứng bất thường. Rủi ro kỹ thuật liên quan đến sự cố cảm biến, mất tín hiệu định vị hoặc kẹt robot. Rủi ro vận hành bao gồm mất nguồn điện, ngưng hệ thống in 3D hoặc mất kết nối truyền thông. Tất cả các rủi ro đều được giảm thiểu bằng cách áp dụng quy trình giám sát liên tục, dự phòng hệ thống cảm biến và sử dụng mô hình dữ liệu địa chất nâng cao.
Robot BADGER và các công nghệ tương tự mở ra triển vọng lớn cho thi công ngầm trong tương lai, đặc biệt khi các đô thị ngày càng yêu cầu hạ tầng kỹ thuật hiện đại nhưng vẫn phải hạn chế tác động đến bề mặt. Công nghệ khoan ngầm bằng robot kết hợp với thông tin địa chất thời gian thực, điều khiển tự động và in 3D trong lòng đất tạo thành một giải pháp công nghệ cao, hiệu quả và bền vững. Đây được xem như bước phát triển tất yếu của phương pháp HDD truyền thống và sẽ đóng vai trò ngày càng quan trọng trong việc xây dựng hạ tầng kỹ thuật ngầm tại Việt Nam.
Biện pháp thi công khoan ngầm bằng robot
Khoan đặt ống ngầm như ống dẫn nước / ga ngầm hoặc ống dẫn cáp viễn thông có thể là một quá trình rất khó khăn. Thông thường, một rãnh phải được đào trước, sau đó sẽ được lấp lại sau khi đường ống đã được đặt dọc theo đáy. Có thể dễ dàng hơn nếu các đường hầm có đường kính nhỏ có thể được khoan trực tiếp vào đất - đặc biệt là trong môi trường đô thị? Đó là những gì robot BADGER tự động đang được thiết kế để làm.
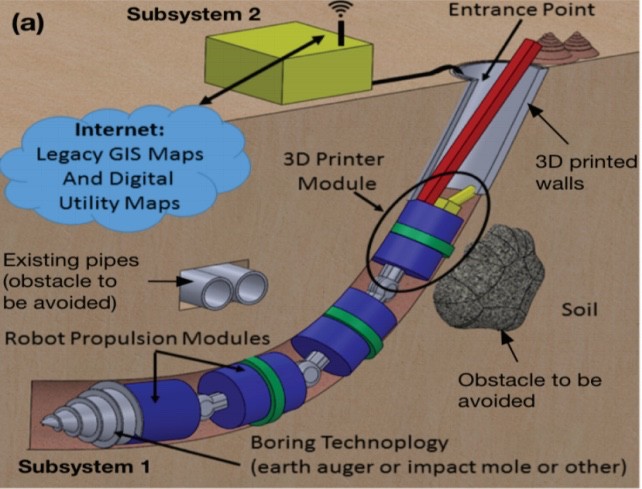
BADGER (roBot cho các tùy chọn, lập bản đồ và điều hướng không rãnh của Autonomous unDerGround) có một phần thân được phân đoạn có các đường ren, với các phân đoạn được nối với nhau bằng các khớp chung.
Ở phía trước sẽ là một đầu khoan, cũng sẽ sử dụng sóng siêu âm để giúp phá vỡ vật liệu mà nó đang gia cố. Mỗi phân đoạn sẽ được trang bị các cơ chế kẹp vào các bức tường bên trong đường hầm. Phần còn lại của mỗi phân đoạn sau đó sẽ trượt về phía trước so với các cơ chế đó, cho phép robot di chuyển theo cách giống như một con sâu sử dụng sóng nhu động để nhích theo cách của nó.
Ở phía sau (hoặc có thể trên một robot khác theo sau) sẽ là một máy in 3D. Nó sẽ lắng đọng một lớp nhựa thông trên các bức tường của đường hầm, gia cố chúng và về cơ bản biến đường hầm thành một đường ống.

Cáp điện và dữ liệu sẽ chạy từ phía sau của robot đến bộ phận điều khiển trên bề mặt, nơi các thành viên phi hành đoàn có thể theo dõi tiến trình của nó, thậm chí tiếp quản và điều khiển thủ công nếu cần thiết. Ngoài ra, một phần phụ hình ống ở phía sau của rô bốt sẽ bơm đất bị vỡ lên bề mặt.
Khoan robot BADGER cũng sẽ được trang bị một đơn vị đo lường quán tính - sự kết hợp của gia tốc kế, con quay hồi chuyển và từ kế - mà nó sẽ sử dụng để đo vị trí tương đối của nó trong lòng đất. Bằng cách này, nó sẽ có thể đi đúng hướng. Nó sẽ được hỗ trợ bởi radar xuyên đất, nó sẽ sử dụng để phát hiện và tránh những chướng ngại vật như những tảng đá lớn trên đường đi của nó. Điều đó nói lên rằng, đường đi của nó phải tương đối rõ ràng, vì một bộ phận radar xuyên đất đặt trên bề mặt sẽ được sử dụng để vẽ sơ đồ ban đầu của đường hầm.
CHUYÊN ĐỀ BIỆN PHÁP THI CÔNG KHOAN NGẦM BẰNG ROBOT TRONG CÔNG TÁC LẮP ĐẶT ỐNG NGẦM VÀ CÁP VIỄN THÔNG
Trong bối cảnh phát triển mạnh mẽ của hạ tầng đô thị và công nghiệp, nhu cầu xây dựng hệ thống ống ngầm và cáp viễn thông ngày càng gia tăng, đặc biệt tại các khu vực có mật độ dân cư cao, tuyến giao thông trọng điểm và khu vực ven sông. Các phương pháp thi công truyền thống như đào rãnh lộ thiên không còn phù hợp do yêu cầu mặt bằng lớn, thời gian thi công kéo dài và gây ảnh hưởng đáng kể đến giao thông, môi trường cũng như các công trình hiện hữu.
Sự ra đời của công nghệ khoan ngầm robot đánh dấu một bước tiến quan trọng trong lĩnh vực thi công không rãnh. Đây là sự phát triển nâng cao từ công nghệ khoan định hướng ngang (HDD), hướng tới tự động hóa quá trình thi công, tăng độ chính xác và giảm thiểu tối đa tác động lên bề mặt. Một trong những hệ thống tiêu biểu là công nghệ robot đào ngầm tự hành BADGER, được phát triển nhằm phục vụ lắp đặt các tuyến ống kỹ thuật nhỏ, ống cấp nước, ống dẫn khí và ống luồn cáp viễn thông mà không cần đào mở.
Khoan đặt ống ngầm là một quá trình kỹ thuật phức tạp do phải xuyên qua nhiều lớp địa chất khác nhau và đồng thời tránh các công trình ngầm hiện hữu như hệ thống cấp thoát nước, cáp điện, móng công trình và các cấu trúc địa chất cứng. Mặc dù HDD truyền thống đã cải thiện đáng kể so với đào rãnh, nhưng vẫn phụ thuộc nhiều vào kinh nghiệm người vận hành và khả năng theo dõi thông qua thiết bị định vị.
Công nghệ khoan robot khắc phục những hạn chế này bằng cách tích hợp hệ thống cảm biến, thiết bị dò địa chất, hệ thống định vị và bộ điều khiển tự động ngay trên robot. Robot có khả năng di chuyển trực tiếp trong lòng đất, liên tục thu thập và xử lý dữ liệu để điều chỉnh hướng khoan theo thời gian thực. Điều này đặc biệt hữu ích khi thi công trong điều kiện địa hình phức tạp hoặc khi yêu cầu độ chính xác cao.
Về nguyên lý hoạt động, hệ thống khoan robot kết hợp với giàn khoan HDD để thực hiện quá trình thi công. Giai đoạn đầu là khoan thí điểm, trong đó robot dẫn hướng tạo đường khoan theo quỹ đạo thiết kế. Các cảm biến trên robot cung cấp thông tin về vị trí, độ sâu, áp lực đất và điều kiện địa chất, giúp điều chỉnh hướng khoan chính xác.
Sau khi hoàn thành lỗ khoan dẫn hướng, tiến hành doa mở rộng để đạt đường kính phù hợp với ống cần lắp đặt. Quá trình này được kiểm soát chặt chẽ nhằm đảm bảo ổn định thành lỗ và hạn chế biến dạng. Dung dịch khoan được sử dụng để bôi trơn, giảm ma sát và vận chuyển mùn khoan ra ngoài.
Giai đoạn cuối cùng là kéo ống hoặc lắp đặt cáp viễn thông. Ống bảo vệ, thường làm từ HDPE, được hàn nối thành tuyến liên tục và kéo qua lỗ khoan. Robot và hệ thống giám sát sẽ theo dõi lực kéo theo thời gian thực để đảm bảo không vượt quá giới hạn cho phép, tránh hư hỏng ống hoặc cáp.
Một trong những ưu điểm lớn của khoan ngầm robot là khả năng tự động hóa cao. Việc giảm phụ thuộc vào thao tác thủ công giúp nâng cao độ chính xác và giảm sai sót trong quá trình thi công. Đồng thời, hệ thống cảm biến giúp phát hiện sớm các nguy cơ như sập lỗ, mất dung dịch hoặc va chạm với công trình ngầm.
Ngoài ra, công nghệ này còn giúp giảm thiểu tác động đến môi trường. Việc không đào mở bề mặt giúp hạn chế bụi, tiếng ồn và không làm gián đoạn giao thông. Điều này đặc biệt quan trọng tại các khu đô thị đông đúc hoặc khu vực có yêu cầu bảo vệ môi trường cao.
Trong thực tế, khoan ngầm robot được ứng dụng rộng rãi trong lắp đặt cáp quang, cáp điện, ống cấp nước và các tuyến kỹ thuật khác. Tại các dự án đô thị thông minh, công nghệ này đóng vai trò quan trọng trong việc xây dựng hệ thống hạ tầng ngầm đồng bộ và bền vững.
Tuy nhiên, việc triển khai công nghệ khoan robot cũng đặt ra một số thách thức. Chi phí đầu tư thiết bị cao, yêu cầu kỹ thuật phức tạp và cần đội ngũ vận hành có trình độ là những yếu tố cần được xem xét. Ngoài ra, điều kiện địa chất đa dạng cũng đòi hỏi phải có giải pháp kỹ thuật phù hợp cho từng dự án.
Để đảm bảo hiệu quả thi công, cần thực hiện khảo sát địa chất chi tiết, thiết kế tuyến khoan hợp lý và lựa chọn thiết bị phù hợp. Trong quá trình thi công, việc giám sát liên tục các thông số kỹ thuật là yếu tố quan trọng để đảm bảo an toàn và chất lượng công trình.
Tóm lại, khoan ngầm bằng robot là giải pháp tiên tiến trong thi công lắp đặt ống ngầm và cáp viễn thông. Với khả năng tự động hóa, độ chính xác cao và giảm thiểu tác động môi trường, công nghệ này đang trở thành xu hướng tất yếu trong phát triển hạ tầng kỹ thuật hiện đại. Khi được áp dụng đúng kỹ thuật và quản lý hiệu quả, khoan robot sẽ góp phần quan trọng vào việc xây dựng hệ thống hạ tầng bền vững và an toàn trong tương lai.
CÔNG TY CỔ PHẦN TƯ VẤN ĐẦU TƯ & THIẾT KẾ XÂY DỰNG MINH PHƯƠNG
Địa chỉ: 28B Mai Thị Lựu - Khu phố 7, Phường Tân Định, TP.HCM
Hotline: 0903 649 782 - 028 3514 6426
Email: nguyenthanhmp156@gmail.com ,
Website: www.minhphuongcorp.com



Tin liên quan
Bình luận (0)
HOTLINE

HOTLINE
0903 649 782




HOTLINE
HOTLINE
0903 649 782






Gửi bình luận của bạn